チャレンジコース・ロボットカー講座第2回3回
公開日:2021年11月16日 最終更新日:2023年01月05日
| タイトル |
チャレンジコース・ロボットカー講座 第2回、3回報告
|
詳細
 「ロボカー講座第3回」の活動が行われました。10月3日に行われた第2回も併せて報告します。
この講座は、「日本文具財団」の助成と、岡崎市教育委員会の後援を受けております。
【第2回】
令和3年10月3日 13時~17時
於;クラブハウス
参加受講者 ; 12名
指導員;天野、原
LEDの取り付けとプログラミング
タッチセンサの取り付け
【第3回】
令和3年11月7日 13時~17時
於;クラブハウス
参加受講者 ; 10名
指導員;天野、原、渡会(記)
本日の講座内容
今回の講座は、前回、マシンにセンサー(リミットスイッチ)が取り付けられたので、それを使って、マシンの前の障がい物に会ったらそれを避けるためのプログラミングざんまいです。
プログラミング前に必要なことは入出力設定で、タッチセンサーの設定がきちんとされているか確認はおこたらないことです。
出席をとってから始まります。
|
 【活動報告は第3回の内容】
これがタッチセンサーの設定だ。(青の所がきちんとタッチセンサーになったかな)あとは、プログラムで動きを決める。1個の障がいだけでなく連続で避けられるようにするのが、今日の目標だ。 |
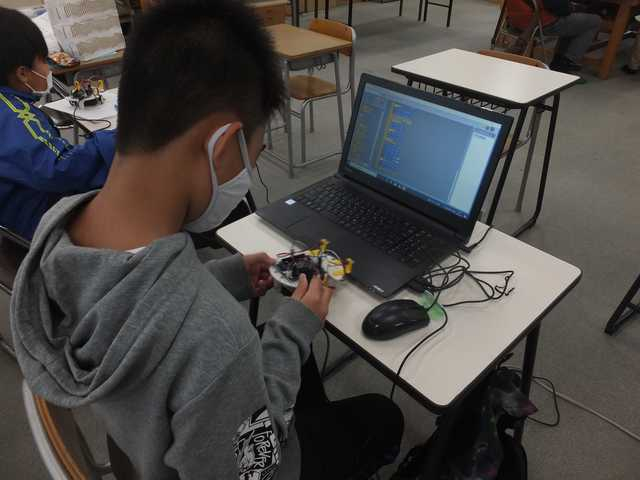 さっそくプログラミング開始。タッチセンサーのリミットスイッチが働くと、表示がどう変わるのか確認。1→0になるかな。 |
 画面が暗いけど、席の配置が向かい合わせになって友達の様子が見られるし、となりの人との距離がはなれている。プロジェクターの画面も見やすいしいいね。 |
 今日までのマシンの全景。フロントのライトは、キャノピーをかぶせるときには工夫が必要だけど、なんかロボットカーらしくなっている。 |
 テストランで、タッチセンサーの働きやマシンのうごきを細かく調整する。
3連続でジグザグ走行がうまくできるかな。動く距離は、時間で設定しなければならないから調整がたいへんです。 |
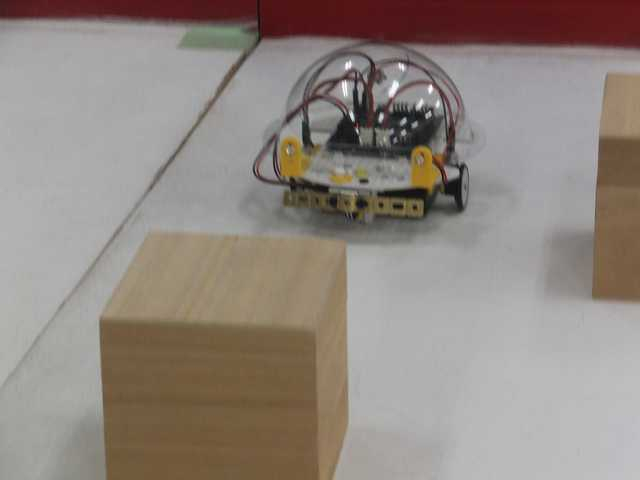 目の前に立ちはだかる障がい物に向かってばく進。うまくかわせられるかな?バンパーのリミットスイッチがうまく働きプログラム通り動くか心配。カットアンドトライで調整する。 |
 今日の講座の最後は、お父さんお母さんや先生に「私のマシンのプログラムではこう動きます」と説明してからスイッチオン。ライトを点滅して走りだします。
|
 次回12月5日はセンサーとして「目」をつけて、足元も見ながら走られるようにするよ。らいげつも楽しみながら頑張ろう。 |